How to make an obstacle avoiding robot

What is an obstacle avoiding robot?
An obstacle avoiding robot or an obstacle avoiding car is a vehicle in motion that avoids colliding with an obstacle either by taking a turn or by stopping at the obstacle. This prevents the robots from causing damage and casualties.
Which sensor to use to make an obstacle avoiding car?
Just to talk about the general practice, an obstacle avoider robot can be made using either of these sensors.
- IR sensor – Infrared sensor
- Ultrasonic sensor
Both of them work on different principles and the output of ultrasonic sensors would be more accurate in the real world.
However, for learning purposes, we will use an IR sensor that comes in the DIY robotic starter kit and DIY robot car kit.
Both of these robotic kits can help you make an obstacle avoiding robot.
Circuit for obstacle avoiding robot
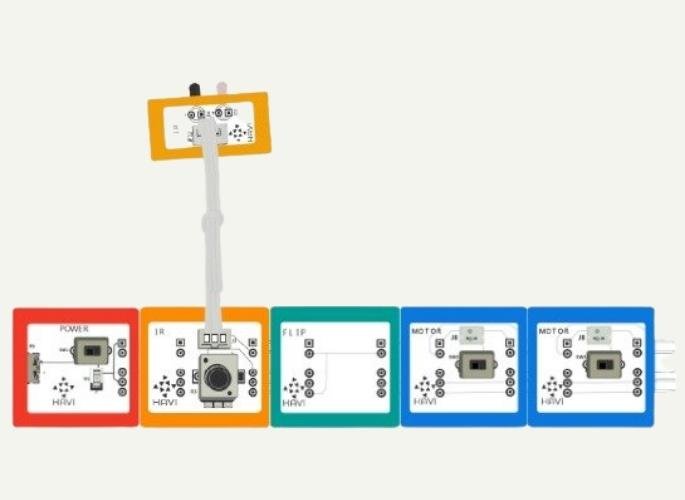
Elements required
- Power Element
- Motor Elements (2)
- Flip Element
- IR Element pair with connecting cable
Accessories required
- Car plate
- Power bank
- Geared motors (2)
- Wheels (2)
- Roller
- Double sided tape
- Wire ties
You can find all these elements and accessories in the DIY Robotics starter kit and DIY toy car kit.
Or you can contact us to get the elements & accessories used to make obstacle avoiding robot project.
There are two different functions an obstacle avoiding robot can perform.
- Stop the car if it detects an obstacle: The car or robot will stop and stand still at the obstacle. It will continue moving forward if the obstacle is removed, or if you change the direction of the car, towards a clear way ahead.
- Take a turn if the robot detects an obstacle: The robot will take a turn when it sees the object, to avoid a collision, and will continue moving in that direction until it sees another obstacle which makes it change the direction again.
Circuit for obstacle avoiding robot that stops at an object
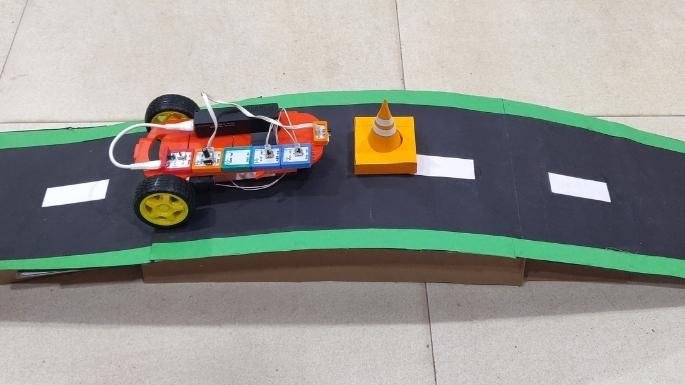
Step 1: Make the car
Please refer to How to make a robot using Havi Elements or watch the following video.
If you are making an obstacle avoiding robot using Havi Robotic Car Kit, checkout instructions of How to make a robot car.
Step 2: Place the circuit
Place the circuit on the robot using DST or elements hooks (if you are making it with the DIY robot car kit) and connect the motors.
Step 3: Tune the IR Element
Use the potentiometer to set the range of the IR element. Set the potentiometer so it detects the adequate distance. Keeping the sensitivity high should help as it will detect the obstacle at distance and will prevent a collision.

Step 4: Execute your project
The obstacle here can be any object like a wall, human, pets, books, or any other physical object that comes into the sight of the IR Element.
How the obstacle avoiding car works
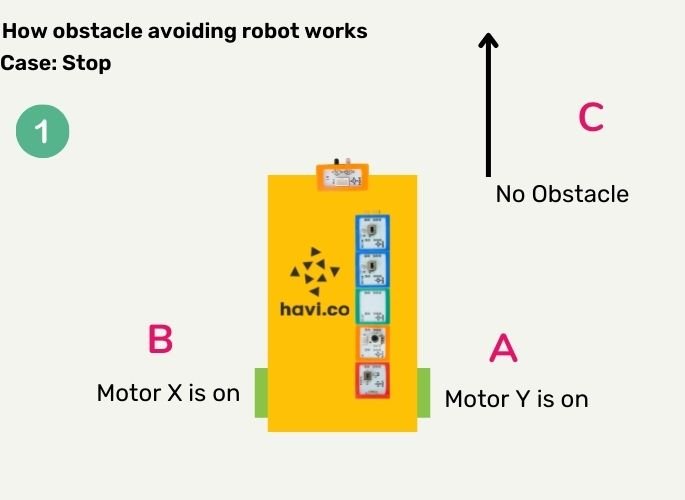
Case of a robot that stops at an obstacle.
The Flip element between IR and motors will make the motors run in case there is no obstacle. So when the IR detects the object, the Flip will send a no command and the motors will stop rotating. That makes the robot stop.

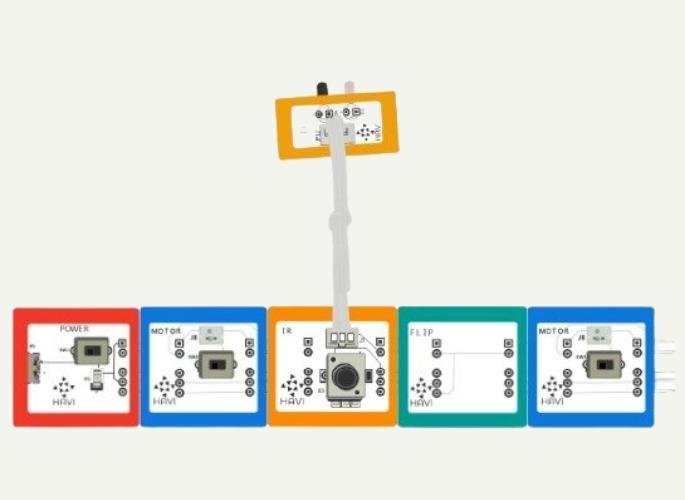
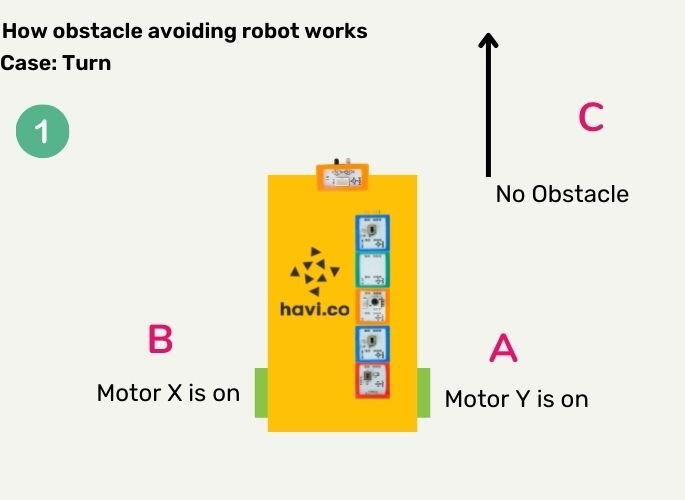
Case of robot that takes a turn at the obstacle.
Here one of the motors is out of IR control and which will continue rotating, irrespective of the presence of an obstacle. But another motor, under the control of IR and flip, will stop at an obstacle. That makes the car take a turn.

Applications of obstacle avoiding robots.
For a smart autonomous car, obstacle avoidance is the top most feature to keep the passenger safe.
The same is the case for robots.
Avoiding obstacles is the most important and common feature of all the smart cars and robots that are in motion.
Now try building one and experience it yourself. Contact us to get the customized pack.
