How to make an edge avoiding robot
What is an edge avoiding robot?
An edge avoiding robot is a robot that runs on a surface like a table and can effectively detect when it reaches the edges or cliff of the table. As it approaches the edge, it will change direction to avoid falling from the table. It will follow and walk only on the boundaries of the table.
So let’s begin.
Which sensor is used in an edge avoiding robot?
Usually, any of the following two sensors are used to make an edge avoiding car.
- IR sensor – Infrared sensor
- Ultrasonic sensor
An IR Sensor uses infrared light while an ultrasonic sensor uses sound waves to detect an object. Here we are considering the table surface as an object and tuning our sensor to follow it.
For this project, we will be using just one IR sensor to avoid the edge of a table.
We are going to discuss the working of this in detail further.
Edge avoiding robot circuit
You will need the following Havi Elements and accessories to make an edge avoiding robot. With this, even a 7-year-old can make an edge avoiding robots without the complexities of Arduino and coding.
You can find these in any of the havi’s DIY robotic kits
- Power Element
- Motor Elements (2)
- IR Element pair with connecting cable
Accessories required
- Car plate
- Power bank with the USB cable
- Geared motors (2)
- Wheels (2)
- Roller
- Double-sided tape (Not required if you have a Toy car kit)
- Wire ties
- Ice cream stick (Not required if you have a Toy car kit)
Contact us to get these elements & accessories.
Assembly of the circuit

Step 1: Set up a table
Clean a table and set it up for the experiment.
Step 2: Build a car as structure of robot
For DIY Robotics starter kit users:
Please refer to How to make a robot using Havi Elements or watch the following video.
For Havi Elements DIY Robotic car kit users:
Refer to the user manual to build the Robot car.
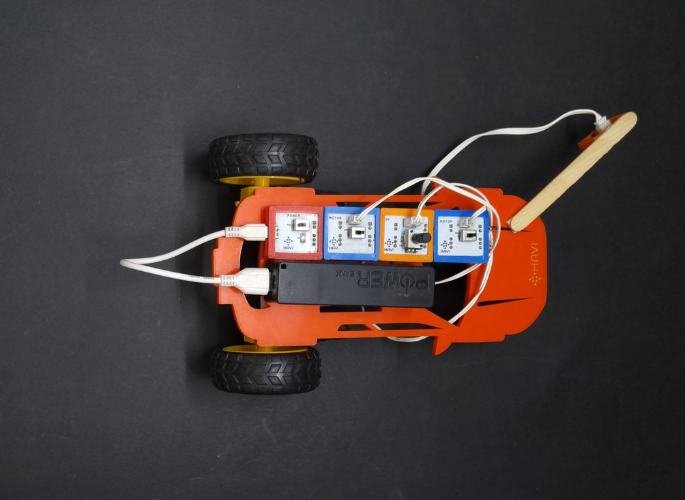
Step 3: Place the circuit
Stick the circuit on the car using DST and connect the motors.
Follow the user manual for circuit placement if you are using a DIY robotic car kit.
Further, we will communicate considering starter kit users in mind. Robotic car kit users can follow the same.
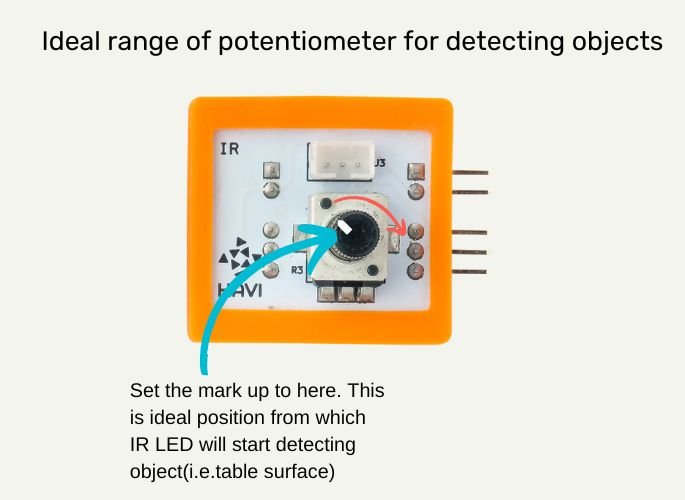
Tuning the IR sensor is the most important part of any creation using an IR Element. Rotate the potentiometer to tune the sensor. Keep the mark of the potentiometer in the center.
How does an edge detecting robot work?
We are using an Infrared sensor or IR element for this edge avoiding robot car project. The sensor detects the IR light bounced back by an object to detect object. Refer to How IR sensor works to know more about working on IR Elements.
We have two motor elements (and hence two geared motors) among which one is under the control of the IR element.
The motor X is always on, so one wheel connected with motor X will always rotate.
The motor Y works under the control of the IR Element.
When IR says there is an object (table surface), motor Y will start.
When IR says there is no object (approaching the edge of the table), motor Y will stop.
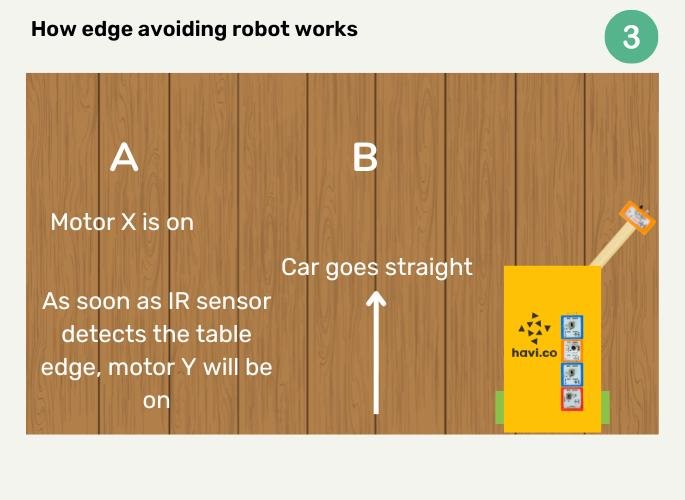
Case:1 When IR LED detects the edge(i.e. object)
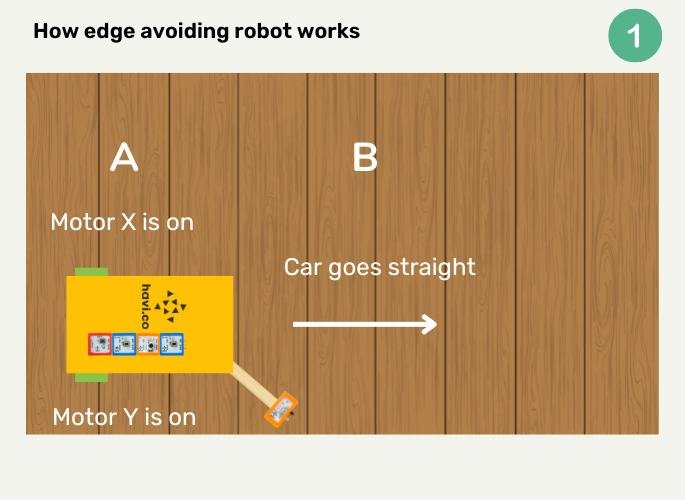
Now, what is the object here? The table surface. As long as the IR LED detects the table, motor Y will be ON and the car will go straight.
Case:2 When the IR LED goes outside the table surface(i.e. No object there)
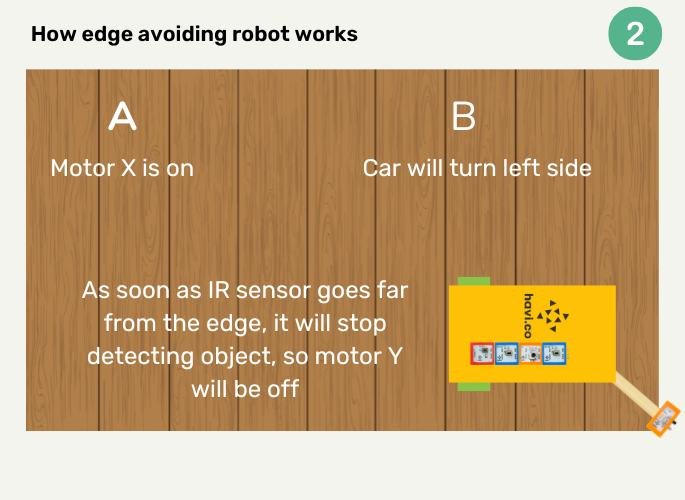
As soon as the IR LED stops detecting any object, motor Y will stop. The car, being powered by a single motor, won’t go straight and will take a turn which will bring the IR LED on the table surface again. IR LED starts detecting the table edge again and motor Y will start and the car starts moving straight again.
Case:3 When the car takes a turn and IR LED comes again on the table surface
This will continue and the IR LED will keep detecting/not detecting table edges and so the car will take turns on the corner of the table and keep moving on edge of the table.

What is the use of an edge avoider robot?
The edge avoiding feature can be very useful for a robot or a car to prevent accidents in the industrial, domestic, transportation, and military applications of moving robots.
Also read
How to make an obstacle avoiding robot
How to make a line following robot